Data Driven Design Research Unit
- KEYWORDS
- Smart City
- Pedestrian ITS
- Crowd Flow Simulation
- Personal Vehicle
- Drone Technology
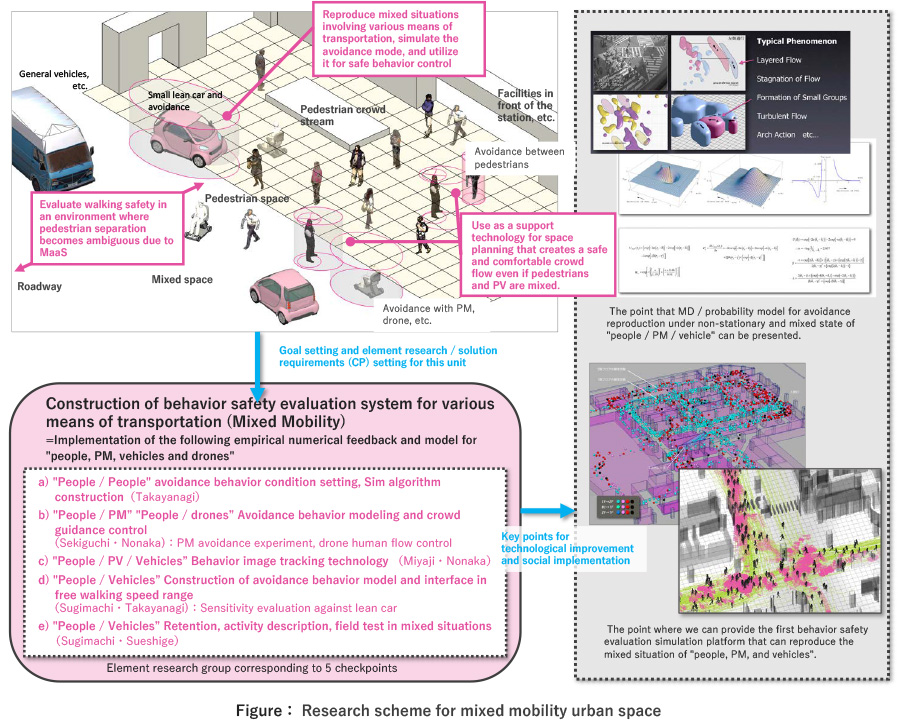
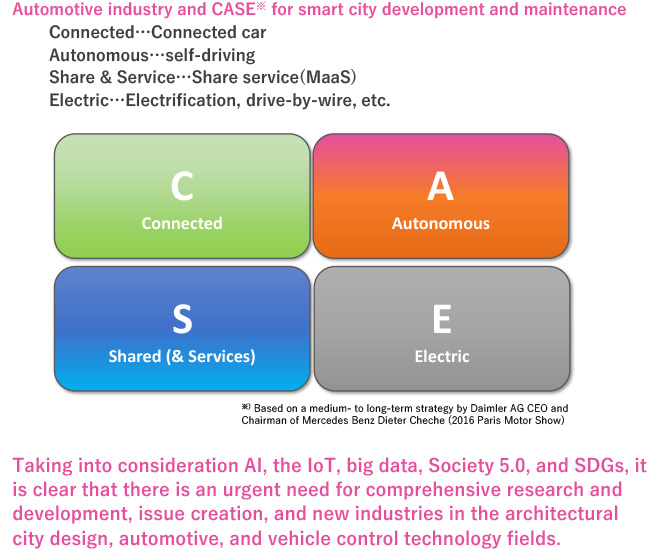
The research purpose of this research unit is to develop a simulation system that evaluates mutual behavioral safety in a “Mixed Mobility Urban Space.” As currently envisioned, smart city development plans will be steadily promoted by Mobility as a Service (MaaS) and vehicle artificial intelligence (AI). However, it is also possible that such urban spaces will produce numerous accidents due to the mixture of pedestrians, cars, PVs, and logistic drones, etc. Moreover, existing pedestrian space safety evaluation methods cannot simultaneously evaluate crowd flow and vehicle behavior. This background provides us with opportunities to holistically consider urban space design and vehicle mechanical engineering. Some remarkable achievements resulting from the studies shown below will be presented in the system construction process.
Research staff
Professor • Unit Leader
Space Design, Ergonomics, Pedestrian Simulation

Professor
Visualization Informatics, Computer Graphics

Associate Professor
Control Engineering, Drone Control, Nonlinear Control

Associate Professor
Automotive Engineering, Vehicle Behavior Evaluation

Associate Professor
Urban Planning, Activity Evaluation

Research themes
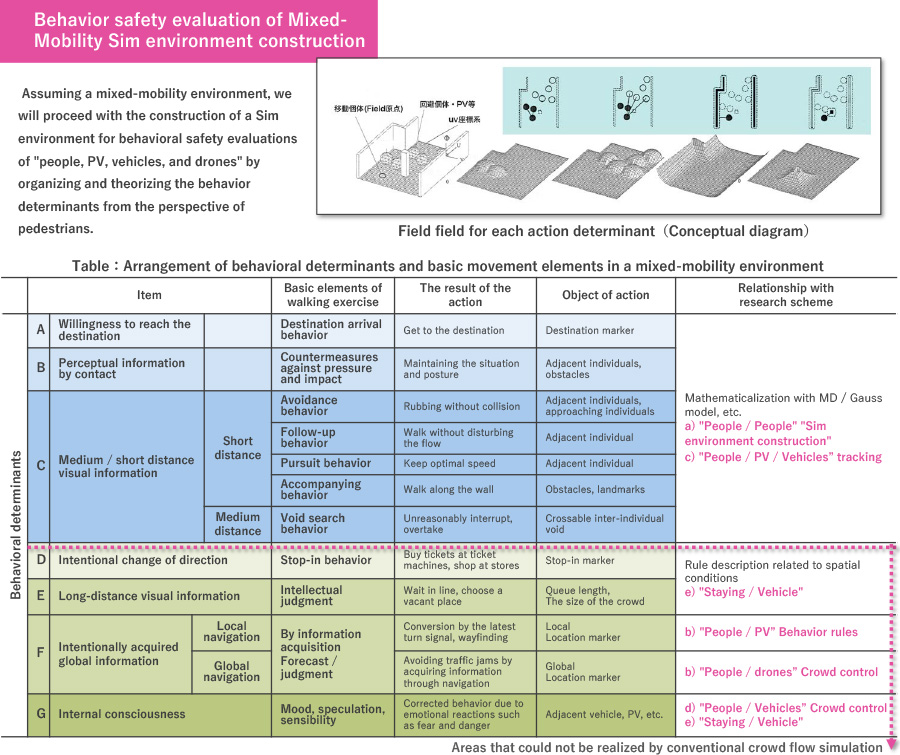
The individual research themes and their characteristics are as follows:
- a) Research on attribute settings for “Person/person” avoidance behavior and the construction of integrated simulation algorithms
- b) Research on “Person/PM” and “Person/Drone” behavior modeling and mobility control
- c) Research on image tracking technology for the behavior of “Crowd flow, PV, and vehicles”
- d) Research on “Person/Vehicle” physiological and sensitive behavioral interfaces in urban space
- e) Research on stay activity descriptions in “Crowd/Vehicle” congestion situations