QOL指向型都市公共空間マネジメント研究ユニット
- KEYWORD
- アクティビティスケープ
- パブリックライフ
- 自動運転車両
- パーソナルモビリティ
本研究ユニットでは、公共空間滞留者のアクティビティと、移動体であるパーソナルモビリティビークル(PMV)の動態をデータドリブンアプローチで解析し、最終的に人間のアクティビティとPMVが共存する公共空間に対する都市生活者が感じる精神的な豊かさ(空間幸福感)を評価し、未来都市のあるべき公共空間マネジメントに資する知見を得る。
研究スタッフ



研究テーマ
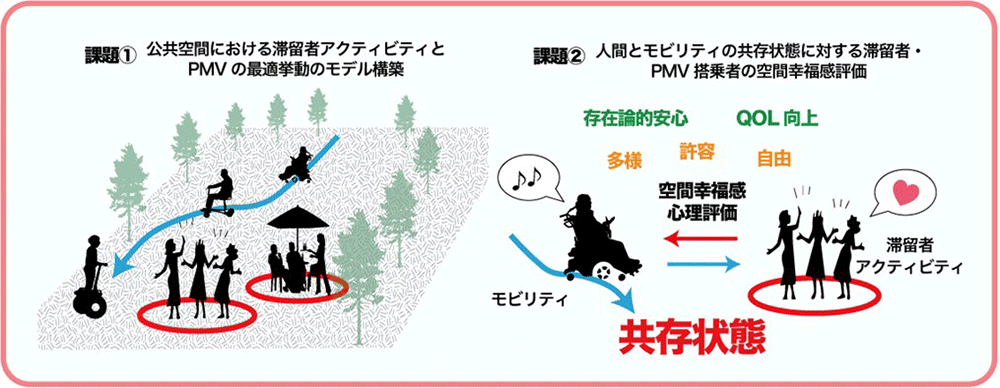
1. 公共空間における滞留者アクティビティとPMVの最適挙動のモデル構築
公共空間に設置したカメラ映像とレーザーセンサー(LiDAR)を併用して、滞留者のアクティビティとPMVの移動軌跡を採取し、それぞれの動態特性を把握して、公共空間における滞留者アクティビティに親和するPMVの最適挙動モデルを構築する。
2. 滞留者アクティビティとPMVの共存状態に対する滞留者・PMV搭乗者の空間幸福感評価
不特定多数が滞留してアクティビティを展開し、PMVが通過するという公共空間の環境に対する心理評価を、滞留者とPMV搭乗者の双方に対して実施し、人間のアクティビティとPMVが共存する公共空間に対する人間が感じる精神的な豊かさ(空間幸福感)を評価する。
これらの成果をもとに、時間消費する滞留者と移動するPMVが共存する公共空間の最適モデルに、都市生活者の空間幸福感を加味した公共空間マネジメントの指針を得る。