データドリブン・デザイン研究ユニット
- KEYWORD
- スマートシティ
- 歩行者ITS
- 群集流動シミュレーション
- パーソナルモビリティ
- ドローン技術
本ユニットの役割と研究目的
2020.4施行の改正道交法・道路運送車両法をうけ、交通・運輸のAI・MaaS化のみならず、都市環境のスマート化も一層進むとされるが、そうした都市構想のもと開発が進められているスマートシティ及びそのパブリックスペースでは、『歩行者・自動自動車・パーソナルビークル(以下PV)・ドローン』など、多様な移動手段が混在し、特に歩行弱者の接触事故等の懸念が一層増すことが懸念される。一方、歩行者空間の安全計画については、公共空間におけるJAS群集サービス水準にて標準的な設計仕様が示されているが、上記のような多様な移動手段の混在様態には対応できない。また昨今開発が盛んな自動運転車椅子やPV、リーンカーにおいても、車両同士の回避制御は考えられていても、歩行者の行き交う空間での適正な挙動制御については、多くの研究余地を残している。よって従前の人間工学・車両機械工学の枠組みを超え、相互データドリブン型の問題解決が急務と言える。
これらの問題意識を受け、本研究ユニットでは、多様な移動手段が混在するパブリックスペースでの移動安全・快適性を保つべく、歩行者・自動運転車・PV相互の挙動特性を知り得、接触事故の未然防止に役立てる『多様移動手段(Mixed Mobility)の挙動安全評価システム』の構築を最終目的とし、スマートライド都市開発に資する未来都市創造研究を、下記の通り学際融合にて行うこととする。
研究スタッフ





研究テーマと特徴
本ユニットは、下記の個別研究要件について、各専門分野研究者の基礎データ参照と実測調査を行いながら、相互の融合知形成を図るものとする。
a)「人・人」回避挙動の条件設定、Simアルゴリズム研究
多様移動手段の混在する状況下での回避と、他の移動個体の挙動に予兆現示がある場合の回避条件設定を、実空間フィールドでの実験調査により明らかにする。
b)「人・PM」「人・ドローン」挙動モデル化とモビリティ制御研究
群集内を自動運転するPMを想定し、歩行群集の非定常現象に適応した自律移動制御アルゴリズムを示す。また群集混雑を未然に同定し、人流を空中から効率的に誘導するドローン挙動のアルゴリズムを構築する。
c)「人・PV・車両」の挙動の画像トラッキング技術研究
歩行者、車両、それぞれ違う速度域・特異な回避様態を現示する多様移動手段がひとつの場所で起こりうることを想定し、新たなトラッキング技術を策定する。
d)「人・車両」自由歩行速度レンジでの回避行動インターフェース研究
滞留者と次世代モビリティ(ナローカー、リーンカー等)との混在状況を想定し、車両形状やリーン様態等を参照し、安全回避領域を策定する。
e)「人・車両」混在状況での滞留アクティビティ記述研究
滞留者と次世代モビリティとの混在状況を想定し、人間の滞留に対する衝突回避・親和を実現するアクティビティモデルを構築する。
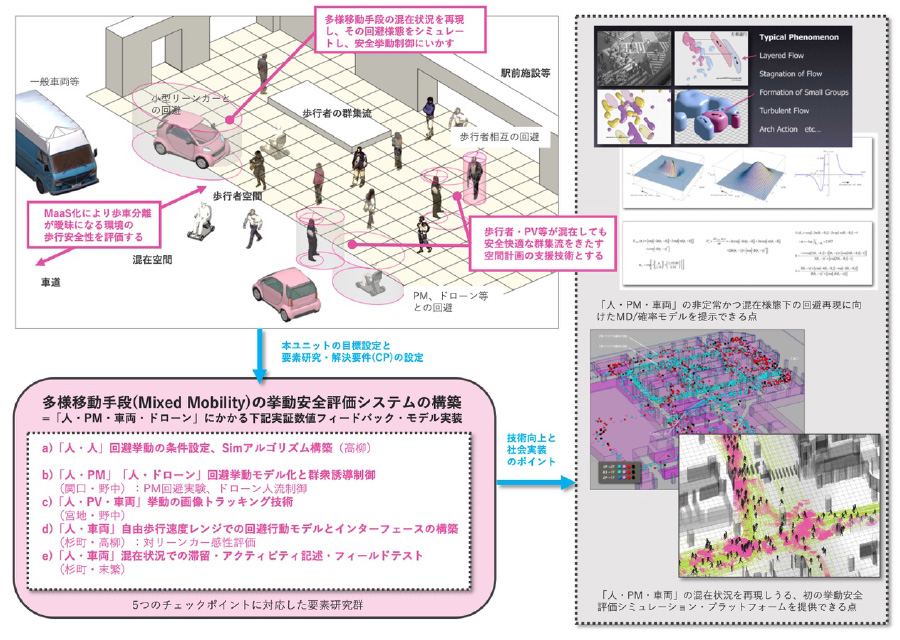
図:Mixed-Mobility都市空間を想定した本ユニットの研究スキーム
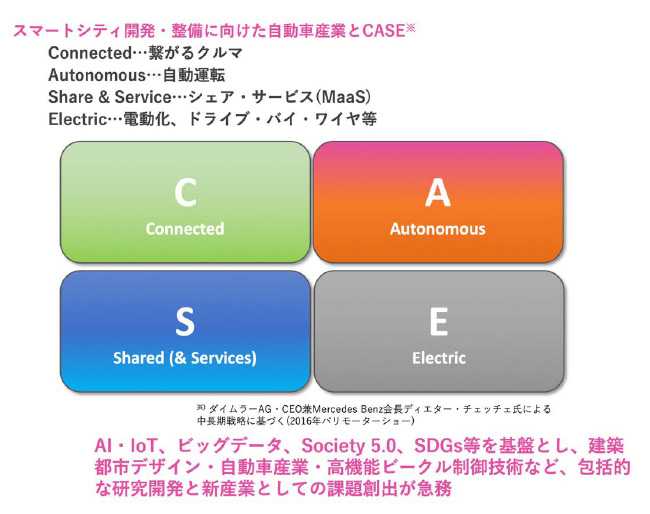
図:本ユニットの研究動機とモビリティ産業界の動向
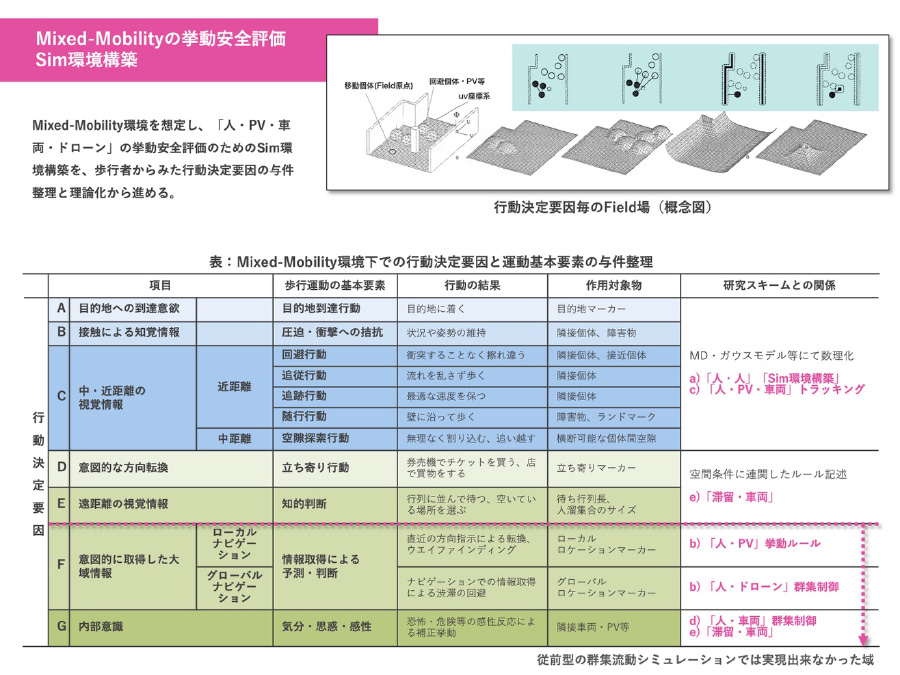
図:Mixed-Mobility環境下での行動決定要因と運動基本要素の与件整理