インテリジェントロボティクスセンター
- KEYWORD
- Robotics
- Control
- Artificial Intelligence
- Image Processing
今日ではロボットのサービスや自動車の自動運転技術が急速に発展していますが、人の活動する環境で実用化するためには、さらなる性能向上と安全性の確立が必要です。本センターでは、人と共存できるインテリジェントなロボットシステムの構築を目指して、ロボティクス、AI、制御、画像処理などの幅広い分野を統合し、国内外の研究機関との連携も視野に入れた先端的なロボットの研究を進めます。
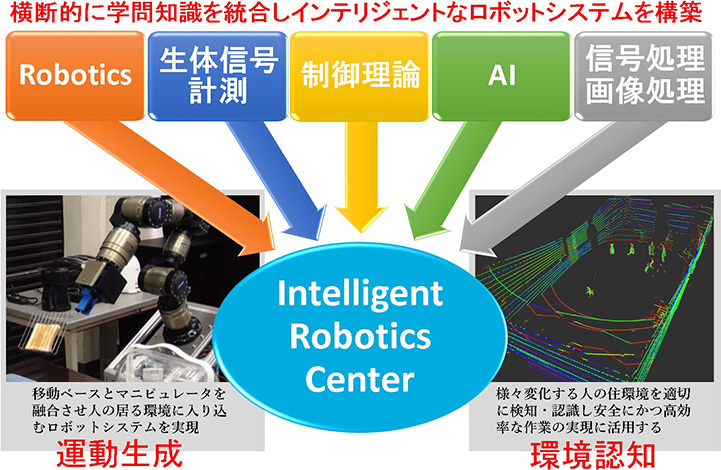
本センターでは、人と共存できるインテリジェントなロボットシステムの構築を目指し、下記などの研究テーマに取り組みます。
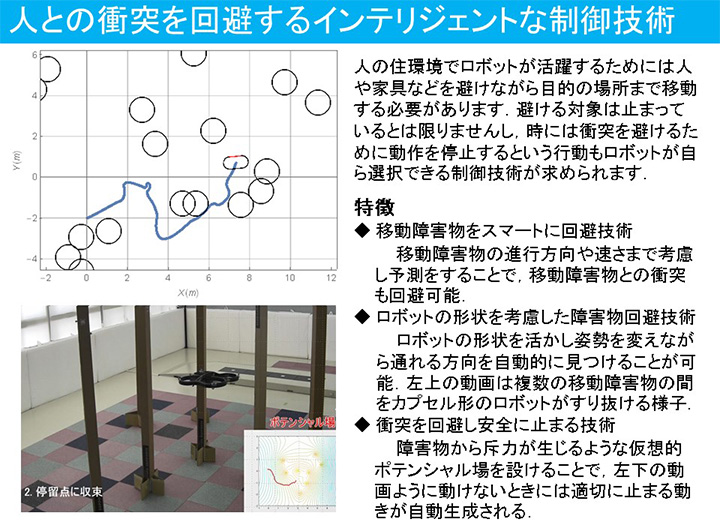
- ●人と共存する自律移動ビークルロボットの高度化
- 人の住環境で自律的に活動する車両やドローンなどの開発や,人の操作を尊重しながら安全性を担保する自動車など,人との協働のためビークル機能を高度化する研究をおこなう。
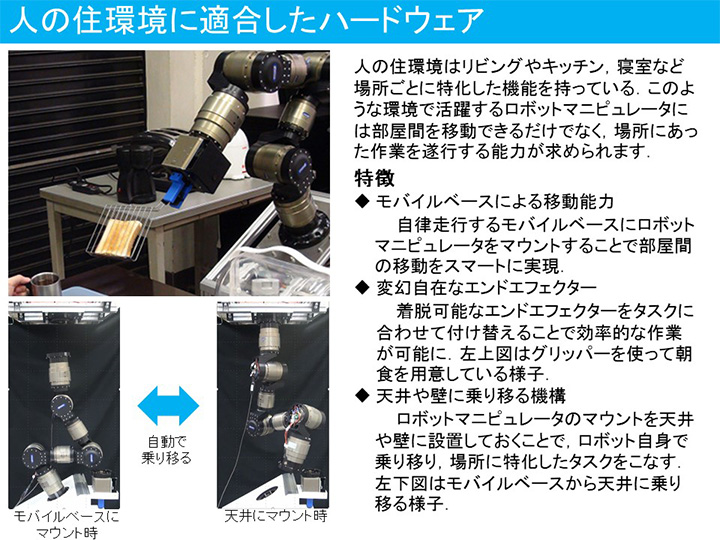
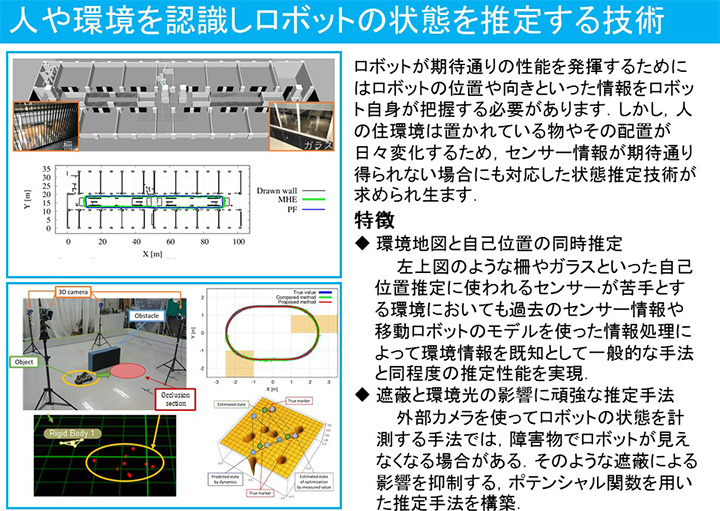
- ●ヒューマノイドロボットおよびホームロボットに対する動作生成と運動制御
- 人とロボットとの社会共存において不可欠な人の行う日常的な作業を実現する物体認識・動作生成・運動制御を研究し,その有用性をロボットによる作業実験を通して検証する。
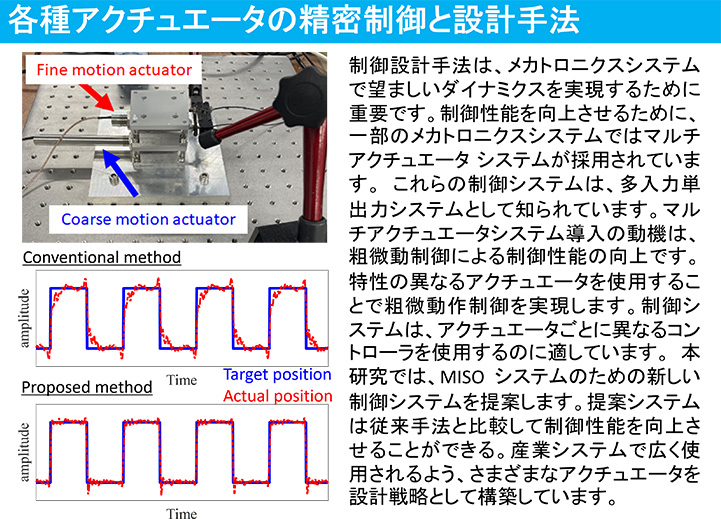
- ●精密サーボ技術によるサーボシステムの高度化
- 高精度なモーションコントロールの実現するサーボシステムの高度化に関する研究を行い,ロボットをはじめ様々なメカトロニクス機器への応用展開を進める。
さらに、マレーシア日本国際工科院(MJIIT)の研究機関と国際的な共同研究を行います.
研究スタッフ




研究紹介